Журнал “Автомобильные дороги”, №2/2021
Видеокамеры превратились в многофункциональные средства измерения
Видеокамеры уже перестали быть инструментом наблюдения. Благодаря развитию видеоаналитики они превратились в многофункциональные средства измерения. И так как почти каждый уголок города уже «подсвечен» той или иной камерой, то логично в качестве технической базы системы мониторинга дорожного движения использовать уже готовый к использованию парк камер уличного видеонаблюдения. При этом, конечно, для полной картины о транспортном потоке иногда приходится устанавливать дополнительные камеры.
В связи с тем, что зачастую камеры видеонаблюдения расположены на высоте не более 5 м от поверхности дороги, нет возможности уместить в кадре сразу весь перекресток так, чтобы отслеживать все направления движения, а также очереди на подходах к перекрестку. В этом, достаточно распространенном случае, приходится покрывать перекресток несколькими камерами. Но тогда картина перекрестка рассыпается – автомобили на разных камерах будут совершенно не связаны между собой, т.е. нет возможности определить интенсивность по направлениям, матрицу корреспонденции и к какому направлению относится очередь.
Сложность задачи реидентификации автомобилей
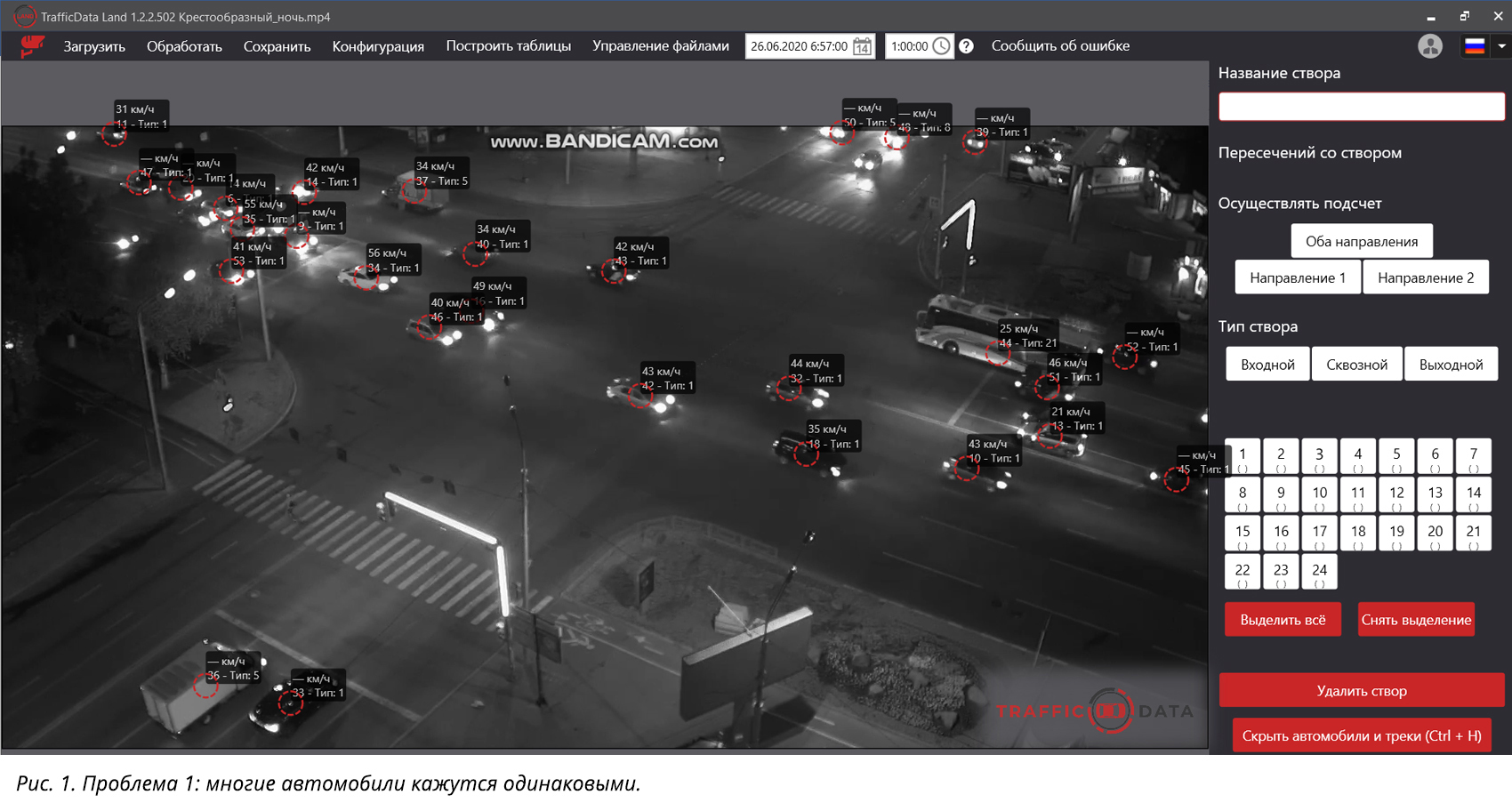
Автомобили крайне сложно реидентифицировать с разных камер, в отличие от людей, одежда и лица которых достаточно уникальны. Если камера не «видит» регистрационный знак автомобиля, то разные автомобили могут быть весьма похожими: один цвет, одна марка… При плохой видимости или малом разрешении кадра разным автомобилям, чтоб быть одинаковыми для камеры, вовсе не обязательно быть одной марки, достаточно быть одного класса и иметь похожую форму. А в ночное время, когда камера работает с инфракрасной подсветкой цвета автомобилей практически не различимы, засвет же от фар стирает остатки различий между транспортными средствами одного класса. И мы видим подобную картину (см. рис. 1). Напомню, если человеческий глаз не различает, то и нейронная сеть не различит.
А также наоборот, один и тот же автомобиль с разных ракурсов с учетом засветов от солнца может «выглядеть» для нейронной сети совершенно различным (см. рис. 2).

Единственная надежная отличительная черта каждого транспортного средства – его государственный регистрационный знак – далеко не всегда может спасти ситуацию. Во-первых, с камер видеонаблюдения на перекрестке, когда автомобили меняют направление, ракурс, а также разрешение могут не позволить наблюдать номер. Во-вторых, сам номер может быть скрыт под толстым слоем грязи, что не редкость.
Таким образом, вследствие особенностей автомобилей как объектов детекции решение задачи по их реидентификации становится крайне затруднительным делом. А добиться при этом достаточной точности с помощью стандартных средств компьютерного зрения становится практически невозможным.
Кросскамерный трекинг
По этой причине команда TrafficData не стала идти стандартным путем по реидентификации объектов. Мы вообще не стали решать задачу реидентификации.
Идея разрешения проблемы следующая. Мы отлично решаем задачу трекинга автомобиля на одном кадре. В данном случае мы имеем «ковровое» покрытие местности камерами, которые между собой никак не связаны. А что, если нам удастся объединить кадры всех камер так, чтоб система воспринимала их как единый?
Для реализации этой технологии мы разработали специальный объект – зона объединения. Это виртуальная зона на местности, выделяемая на кадре всех камер, на которых просматривается данная местность. На кадрах разных камер эта зона может иметь разную форму. А на местности эта зона должна очерчивать одну и ту же территорию для всех камер (Рис. 3).
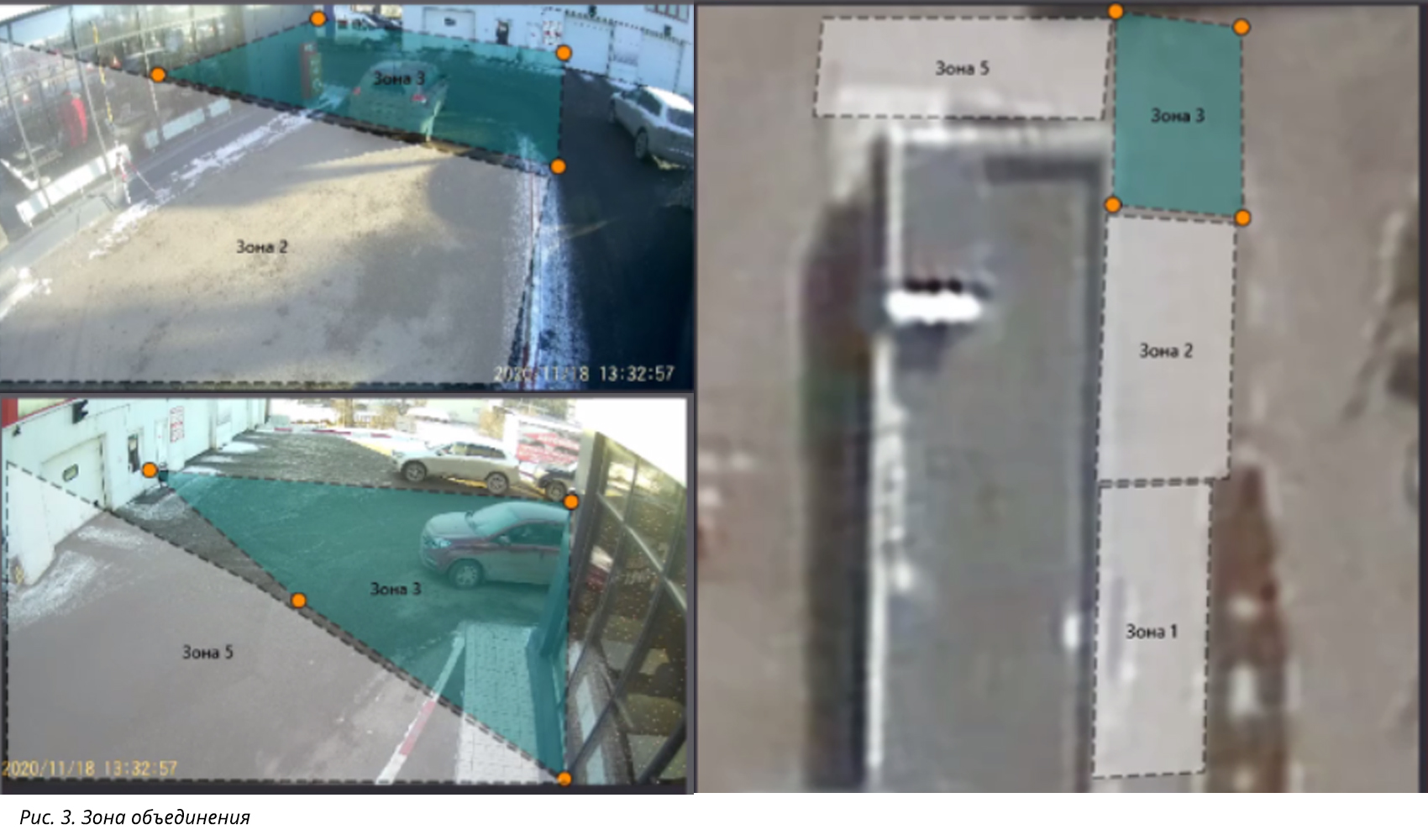
Автомобиль, находясь в зоне объединения, наблюдается со всех камер, кадры которых «сшиваются», и передается от камеры к камере. Таким образом строится сквозной маршрут автомобиля через все камеры, под которыми он проехал.
Технология кросскамерного трекинга позволяет строить маршрут движения детектируемого объекта в рамках коврового покрытия камер без его реидентификации. Данная технология применима не только на обширных перекрестках, но и в других случаях, когда вся территория не просматривается с одной камеры: когда маршрут следования проложен вокруг здания (см. рис. 2), в помещении (крытая парковка), частично перекрыт крышами и пр.
Итак, в данной статье я постарался описать суть авторской разработки компании TrafficData кросскамерный трекинг. Представленная технология позволяет реализовать мониторинг дорожного движения в полной мере, а, следовательно, и адаптивное регулирование светофорных объектов на базе камер видеонаблюдения, установленных на уличных столбах.